APM 2.8 - Mission Planner Wizard Options
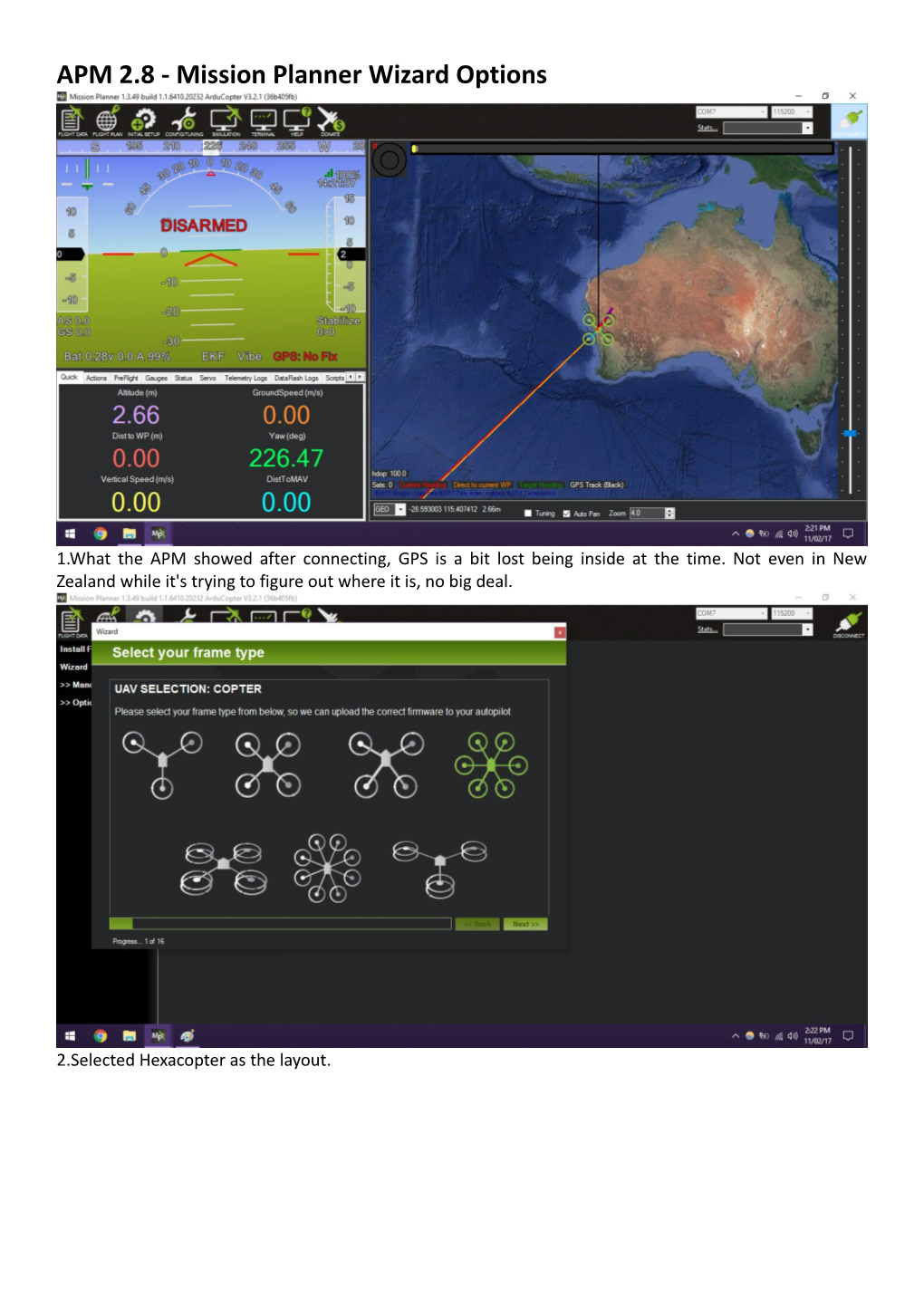
1.What the APM showed after connecting, GPS is a bit lost being inside at the time. Not even in New Zealand while it's trying to figure out where it is, no big deal.
2.Selected Hexacopter as the layout.
- X layout selected.
4.Told it that the APM is V2.5 (Most recent) with a Power Module, and that the battery is 4200 mAh.
- Turned off auto accept and just kept spinning the frame over until it reached around 2000 samples.
- Mag Offsets it finished with.
- No Sonar.
- Recalibrated radio channels. Wasn't needed because they were the same as before. Pitch is reversed but that's an easy fix reversing the channel through the FS-i6 transmitter. 5 Channels connected, 1-4 for flight, 5 is mapped to the 2 position switch on the FS-i6 for flight modes. Channel 6 runs from the FS-iA6B directly to the Storm 32 Gimbal RC Inputs, Pitch control.
9. Flight modes set to the 3 position switch, Position 1 is set to Stabilize, 2 is set to Loiter, 3 is set to RTL.
10. Sitting the frame by my window lets it get a GPS lock inside, everything is all good.
11. No reason why I set this, if the controller is turned off, all channels just stay where they were. eg. If throttle was max and the transmitter dies, the throttle stays maxed.
- No GeoFencing.